Initiation à la programmation et à la robotique - Stage vacances de printemps 2017
Photos du "Junior Fab & Code Camp"
LJAD & Association AMT
mardi 11 avril 2017
Voir en ligne : A propos du stage
Séance 1 :
- Montage mécanique et électrique des roues.
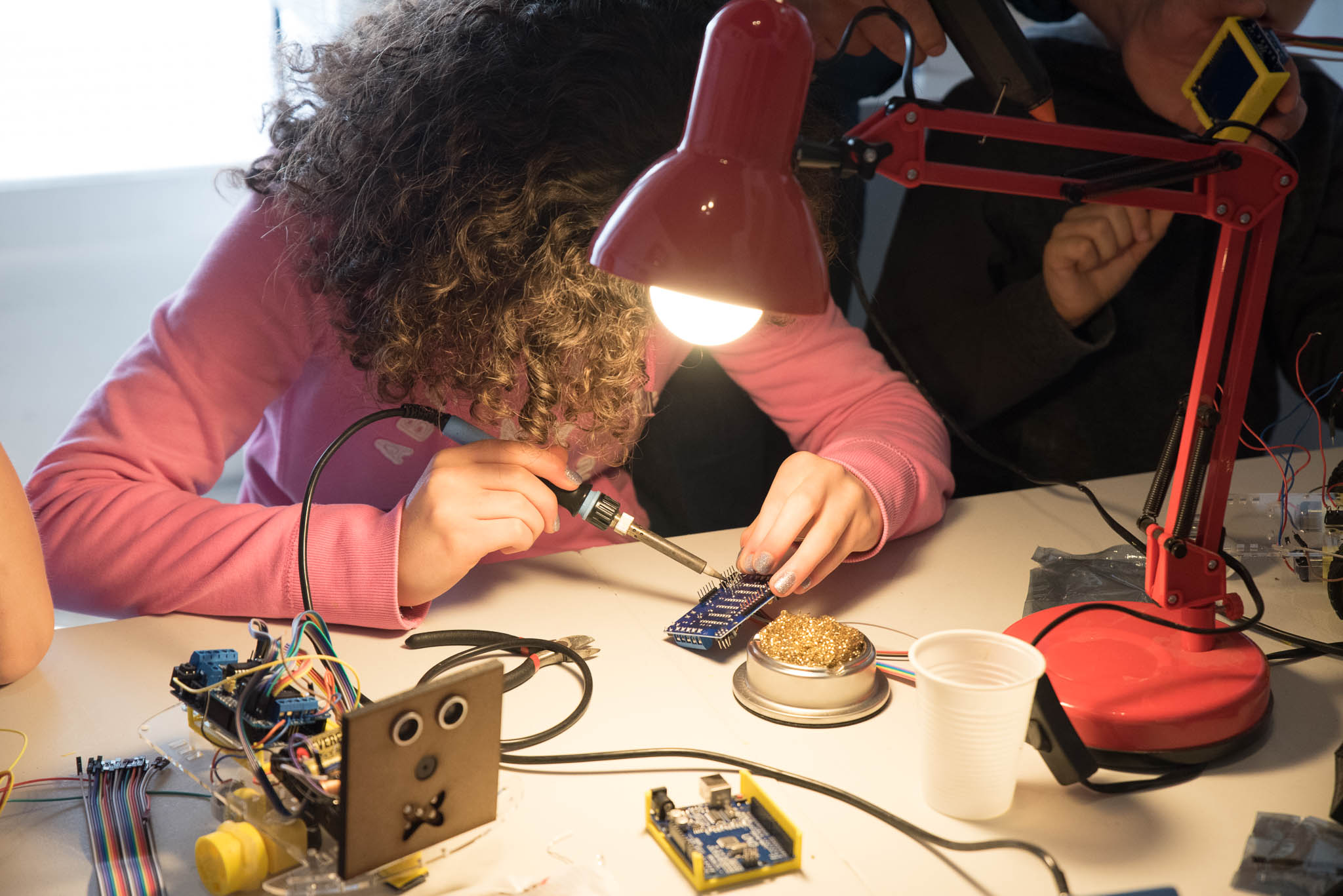
- Montage et soudures des leds.
- Impression 3D de supports.
Séance 2 :
- soudures et mise en place des capteurs et du buzzer.
- Impression 3D de supports & présentation d’Openscad.
- Montage de l’arduino et du shield.
- Premiere présentation du langage arduino et de la bibliothèque dédiée au robot
- Test du bon fonctionnement de l’Arduino, des leds et du buzzer.
Séance 3 :
- fin du montage électronique.
- Impression 3D du support téléscopique du capteur de couleur.
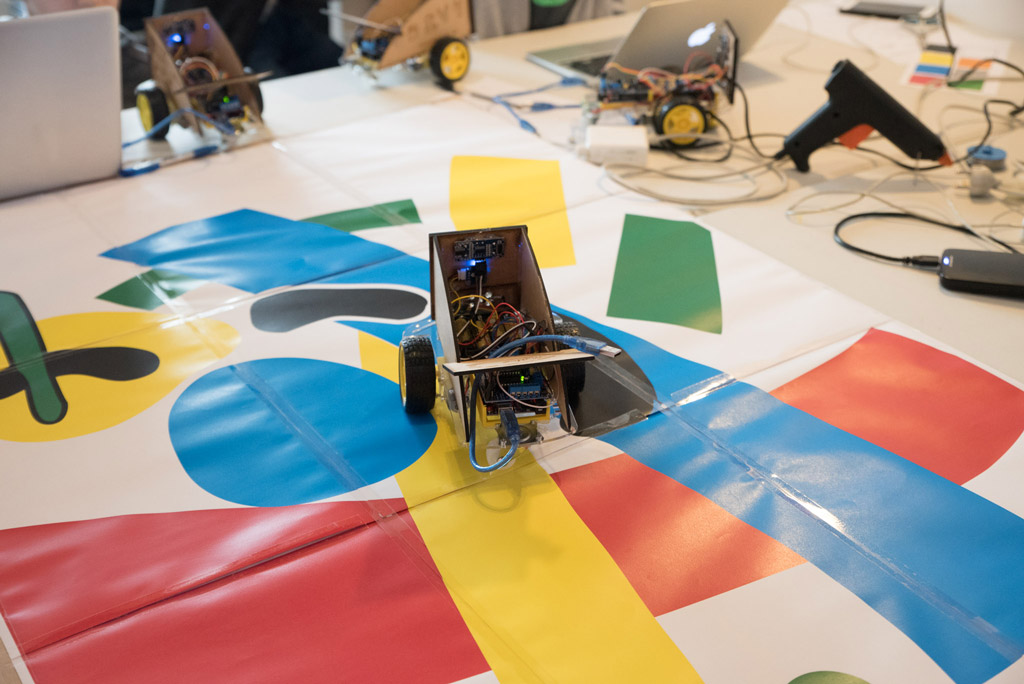
- Programme de test de l’ensemble (transformé en combat de robot :D)
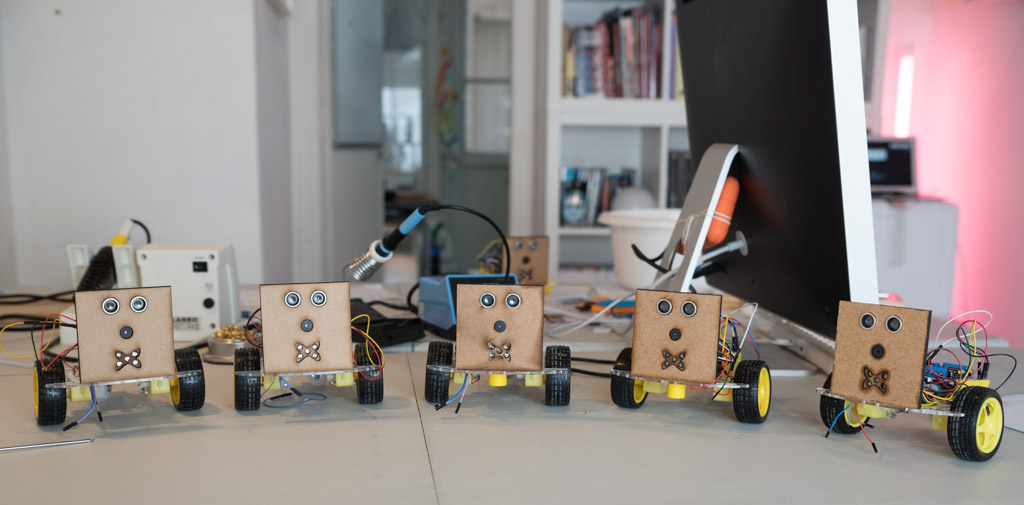
- Dessins et gravures des "blazes" sur le corps des robots.
- Découverte lors de la pause d’une console mythique "vectorielle" : la vectrex.
Séance 4 :
- Montage du capteur de couleurs et de son support télescopique.
- Montage de la "carrosserie" du robot.
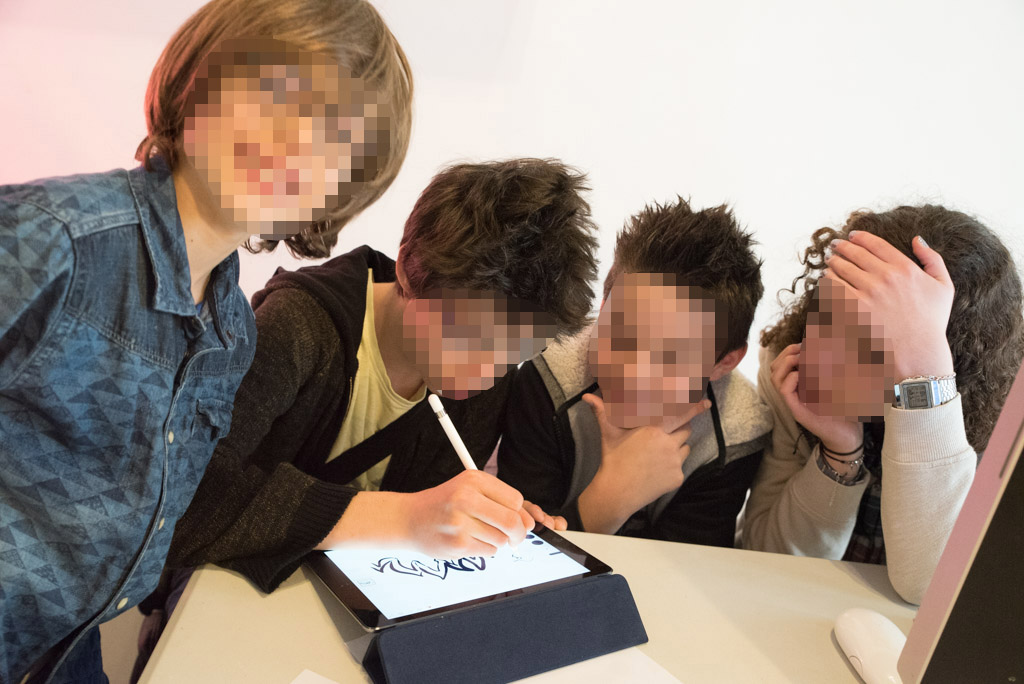
- Défis programmation pour prendre en main le langage et la bibliothèque.
Séance 5 : séance libre et encadré de programmation des robots.






















info portfolio